In onze derde maand concentreerden we ons op het in kaart brengen. Ons plan was eenvoudig: sluit een GoPro aan onder een kajak en volg onze locatie met behulp van een telefoon met GPS-logger-app in de kajak. In werkelijkheid waren er veel kleine stappen – van de app-selectie tot instellingen op verschillende GoPro’s tot kajaktechnieken – die we moesten uitzoeken. Tijdens al deze tests hebben we ook regelmatig stormen meegemaakt die het zicht onder water verminderden en het moeilijker maakten om te gaan kajakken. En dat was nog maar de kant van het verzamelen van afbeeldingen. Als je het wilt uitproberen, kun je ons protocol hier vinden: Sea-floor Mapping Instructions – Google Docs
Crowdsourcing en replicatie
We kregen veel enthousiaste steun met veel kajaks die beschikbaar werden gesteld door Kayak Shack uit Shanon en door Tobia, Melissa, Myron, Diego en Monica. De volgende stap was om genoeg GoPro's en mobiele telefoons te krijgen. We gebruikten telefoons die we gebruiken voor educatieve activiteiten op Mo-B Lab en kregen veel mensen die ons hun GoPro's toevertrouwden, met name Ian, Suyin, Dae, Tatiana en Francielle. Dankzij crowdsourcing konden we er ook voor zorgen dat het proces werkte met verschillende voertuigen, camera's en telefoons. Dat gezegd hebbende, we hebben het proces nog niet getest met een iphone, en toen Melissa en Lisa zich vrijwillig aanmeldden, realiseerden we ons dat onze tracking-app niet beschikbaar was voor iphones.

Hacking de meta-verse
Onder water in kaart brengen is moeilijk omdat GPS onder water niet werkt. Bovendien is het moeilijk om de diepte in de oceaan te meten. Voor ons werk zijn we er nog niet achter hoe we de diepte kunnen meten, maar we hopen data te gebruiken die door de Nederlandse mariniers is verzameld: CDI - Marine data access (emodnet-bathymetry.eu) Als u iemand kent die betrokken is bij het verzamelen van bathymetrische gegevens op Aruba en u bent bereid ons voor te stellen, stellen wij dat zeer op prijs. De afbeeldingen die we tot nu toe hebben verzameld, zijn niet gecorrigeerd voor diepte, dat betekent dat ze geen exacte grootte vertegenwoordigen, maar slechts een momentopname van dat gebied vanaf het oppervlak. De GPS van het oppervlak geeft nog steeds de locatie van het midden van elk beeld weer, alleen niet het gebied. Deze gegevens worden verzameld door de mobiele telefoon in de kajak met behulp van de GPS-logger-app. We gebruiken ExifTool om de gps-trackloggegevens van de telefoon toe te voegen aan de metadata van de afbeeldingen die door de GoPro's onder de kajak zijn verzameld, wat automatisch gebeurt door de tijd te vergelijken. Hoe we dat doen, zie je hier: Video to geotagged images notes - Google Docs

Zooniverse
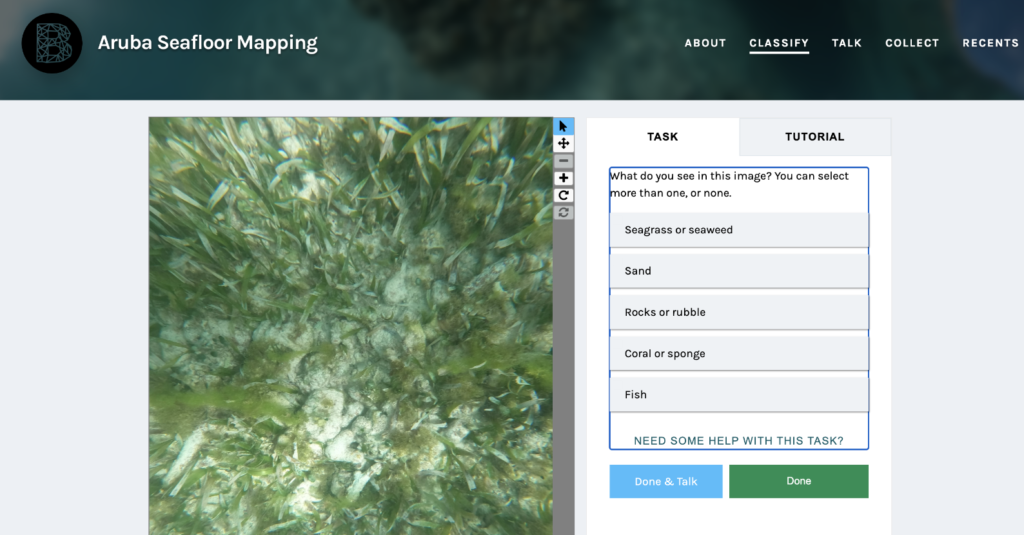
Deze afbeeldingen met geotags worden momenteel geüpload naar ons Zooniverse-project: Aruba Seafloor Mapping » Classify — Zooniverse waar je ons kunt helpen ze te classificeren op dezelfde manier waarop je soms afbeeldingen classificeert voor Captcha wanneer je voltooit dat ik geen robot ben. Geclassificeerde afbeeldingen worden gebruikt om ons gecontroleerde classificatie-algoritme te trainen om deze verschillende items te herkennen. We realiseren ons dat dit nog geen perfecte classificatie is, maar we hebben besloten ons eerst te concentreren op de dingen die gemakkelijker te onderscheiden zijn en daarna kunnen we de afbeeldingen verder sorteren. Op dit moment bevatten de categorieën zeegras/zeewier, rotsen/puin, koraal/spons, zand en vissen als bonus.